Full Paper Download:
ROBOTIC AUTOMATIC GENERATION OF PERFORMANCE MODEL FOR NONUNIFORM LINEAR MATERIAL VIA DEEP LEARNING
Author: Dan Luo, Jingsong Wang, Weiguo Xu
Architecture School, Tsinghua University, Beijing China
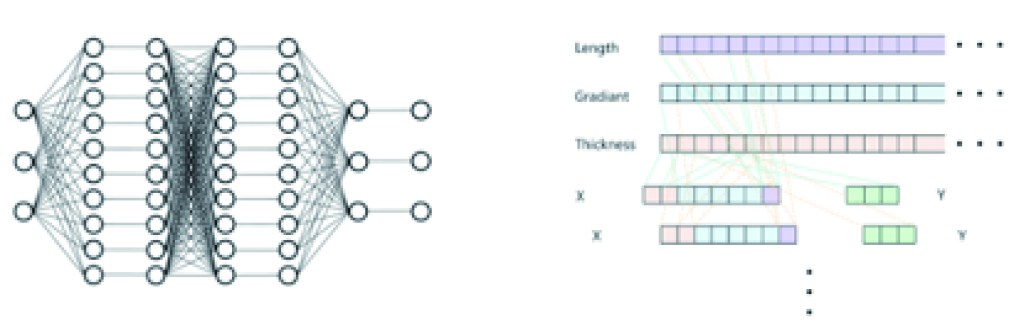
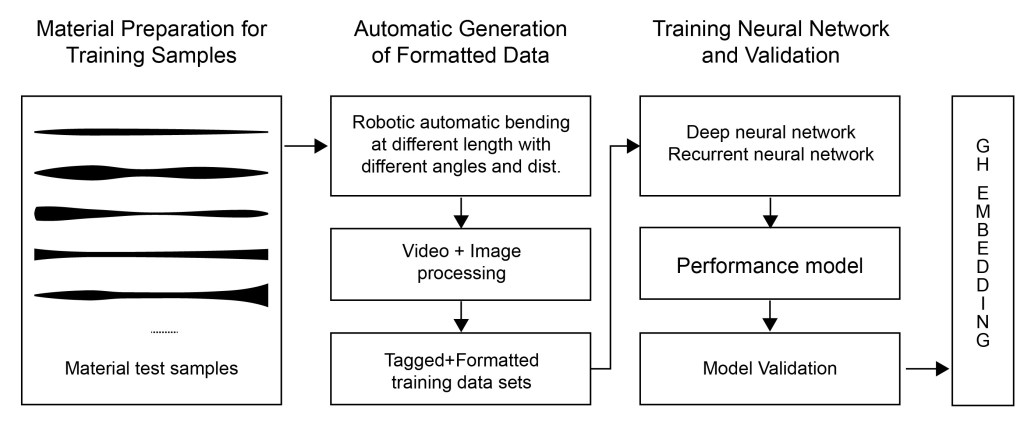
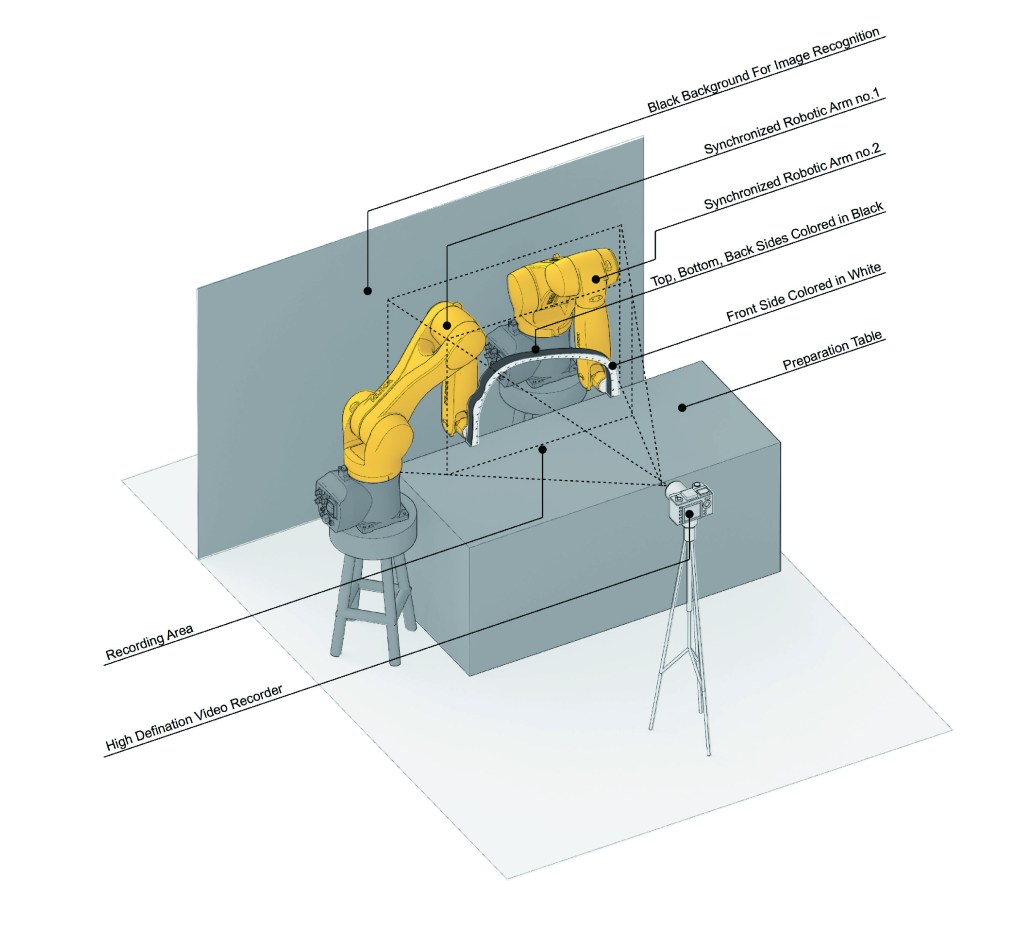
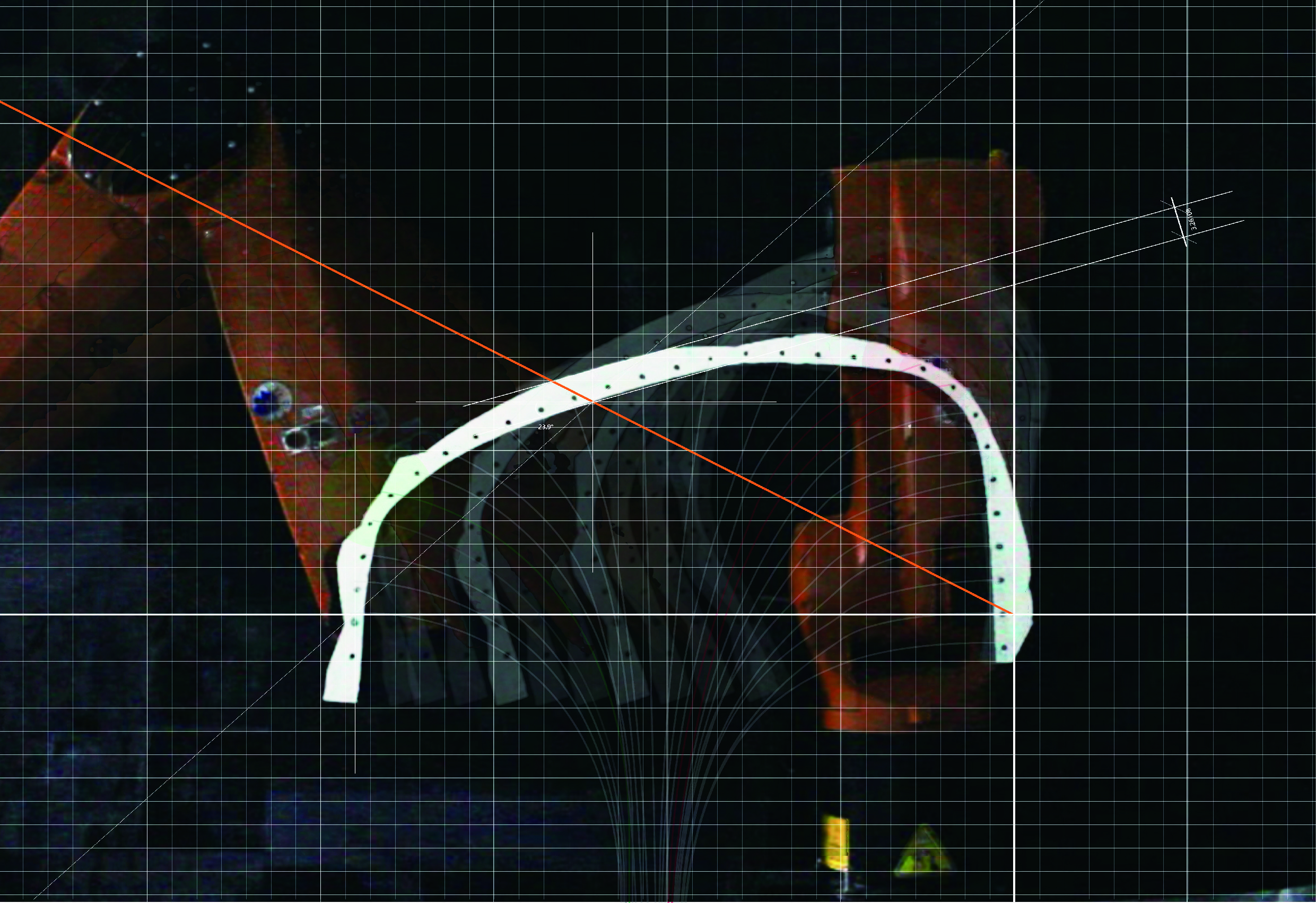
Abstract: In the following research, A systematic approach is developed to generate experiment based performance model that compute and customize properties of none-uniform linear materials to accommodate the form of designated curve under bending and natural force. In this case the test subject is elastomer strip of none-uniform sections. A novel solution is provided in order to gain sufficient training data required for deep learning with an automatic material testing mechanism combining robotic arm automation and image recognition. The training date collected is fed into a deep a combination of neural networks to generate a material performance model. Owning to the black-box nature of machine learning process, the generated performance model is not only the result of a few quantifiable influence factor but is rather a comprehension of all forces at play without the need to understand the explicit mechanic behind. Unlike most of traditional performance model that is only able to simulate the final form from given materials properties and initial conditions, the trained neural network offers a two-way performance model that is also able to compute appropriate material properties of non-uniform materials from target curves, achieving complex forms with minimum and effective programmed materials with complicate nonlinear property behaving under natural forces.
Key words: deep learning, neural network, material computation, robotic automation, Material performance model